Научная школа «Механико-бионические основы разработки почвообрабатывающих машин» утверждена Решением научно-технического совета (протокол № 1 от 31.03.2016 г.) ФГАОУ ВО «Крымский федеральный университет им. В.И. Вернадского».
Природа строит крепче
и мудрее всех инженеров
мира взятых вместе
А. Куприн
Описание научной школы
В глубине своего сознания человек обращается к двум фундаментальным факторам своего существования – пространству и времени. Быстротечность и невозвратимость времени, неисчерпаемость пространства вот те основные свойства, которые волнуют все человечество. Умудренный опытом и ограниченный временем своей жизни, человек спешит познать хотя бы некоторые основы природных таинств. Это стремление породило к жизни новую, успешно сейчас развивавшуюся науку бионику. Как в начале своего зарождения, так и сейчас бионика занимает самые пытливые умы человечества.
Родившаяся на стыке биологических, физико-математических и технических наук, бионика ставит своей задачей использование принципов организации и функциональных схем биологических систем разного уровня при решении инженерно-технических задач. В поистине бездонной кладовой форм живой природы обнаруживаются великолепные образцы совершенных механизмов, конструкций и наиболее оптимальных «инженерных решений». Великий русский математик Н.И. Лобачевский призывал обращаться к природе, которая «хранит все истины и на вопросы будет отвечать непременно и удовлетворительно».
Использование в технике, и особенно сельскохозяйственной, законов и форм живой природы вполне правомерно. Ведь в мире нет непреодолимых барьеров между живой и неживой природой. Объективно существующие законы объединяют весь мир в единое целое. Они порождают возможность возникновения синтетических наук, к которым можно отнести и бионику. Основой этому служит биологическое родство человека с окружающей его живой природой.
Синтезируя достижения многих естественных и технических наук, осуществляя совершенно новый подход к изучению творчества живой природы, бионика с каждым годом захватывает новые рубежи, все больше проникает в различные области практической деятельности. Она формирует и развивает новые научные направления, которые способствуют ускоренному развитию инновационных технологий.
В последнее время в области земледельческой механики сформировалось новое научное направление, заключающееся в бионическом подходе к созданию сельскохозяйственных машин и рабочих органов к ним.
Рождение такого научного направления вызвано велением времени. Ведь существующие технологии обработки почвы, возделывания сельскохозяйственных культур и системы машин для их осуществления нуждаются в дальнейшем совершенствовании в связи с резко возросшими требованиями в области экологии, а также обострившейся проблемой обеспечения энергоносителями. Существенными недостатками в работе серийных почвообрабатывающих машин является их сильное уплотняющее воздействие, разрушение структуры и ухудшение физико-механических свойств почвы. В совокупности с несовершенством форм рабочих элементов и принципов их воздействия на почву это приводит к увеличению энергоемкости почвообрабатывающих машин на 20…25%, что ограничивает возможности более рационального использования энергоресурсов. Все актуальнее становится проблема создания принципиально новых рабочих органов с обратной связью от почвы, разрабатываемых на основе биосистемного подхода по прототипу функционирования рабочих органов живых организмов с учетов современных достижений бионики. Возникает необходимость использования принципов и методов бионики как составной части общей теории систем в совокупности с экологическим подходом. В связи с этим, очень важное значение имеют решения задач по разработке, на условиях бионических сравнений, принципов воздействия рабочих органов на почву при совершенствовании их конструктивных схем, форм, обосновании параметров и методов проектирования.
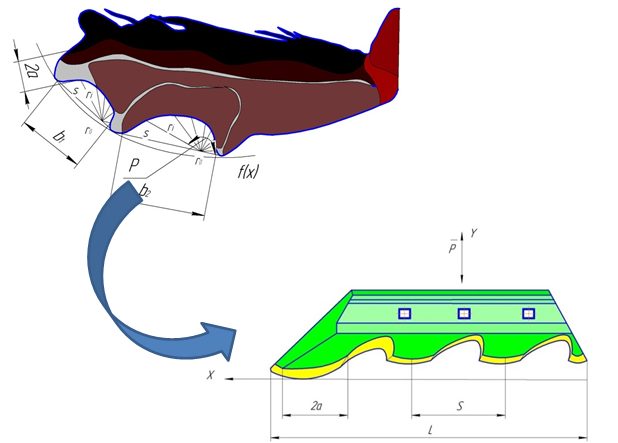
При механической обработке почвы в живую биологическую систему «почва-растение-атмосфера» внедряется четвертый инородный, существенно отличающийся от биосистемы элемент деформатор в виде рабочего органа, что снижает общий уровень её функционирования. Поэтому требует комплексного разрешения проблема взаимовлияния элементов биологической системы с реакцией искусственного рабочего органа в пространстве и времени. В существующих конструкциях пассивных и активных почвообрабатывающих органов, воздействующих на биологическую систему «почва-растение-атмосфера», не имеется обратной динамической связи для реализации чередующихся фаз уплотнения-скалывания почвы, что является их существенным недостатком. В то же время, окружающая нас природа показывает примеры изумительной приспособленности живых организмов к многообразным условиям их существования, в том числе и во взаимосвязи с искусственными объектами. Решить это противоречие предлагается новым способом повышения надежности функционирования биологической системы, создавая рабочий орган по подобию живого организма, а также придавая ему некоторые характеристики и свойства живого прототипа. В этой связи возникает необходимость разработки теоретических основ устойчивого многовариантного функционирования бионической системы «рабочий орган по подобию биологического прототипа – почва-растение-атмосфера» (рис 1).

Рис. 1. Схема бионического моделирования рабочих органов
Рассматривая рабочий орган в этой системе и сопоставляя его с биологическими прототипами, приходим к выводу, что с целью «вживляемости» в бионическую систему он должен своевременно реагировать на изменение площади контакта с ним соударяющихся между собой частиц почвы, в соответствии с ее чередующимися фазами уплотнения-скалывания. Изменяющаяся площадь контакта рабочего органа с почвой приводит к многоконтактной задаче в пространстве, а наиболее быстрое реагирование во времени физически обеспечивается только ударом. Эта гипотеза подтверждается строением и принципом ударного действия биологических объектов.
В теоретических дисциплинах по земледельческой механике еще не ставился и не решался вопрос многоконтактно-ударного воздействия на почву, в соответствии с фазами её деформации и скалывания. Применительно к этому процессу нет теоретического обоснования форм и параметров почвообрабатывающих органов на основе бионических сравнений. При бионическом подходе впервые рассматривается проблема создания на базе бионических исследований в пространстве и времени теоретических основ и практической реализации принципа многоконтактно-ударного воздействия на почву и удовлетворяющих этому принципу параметров и форм рабочих органов, повышающих эффективность технологического процесса обработки почвы. В основу методов решения этой проблемы положена общая теория систем с составной ее частью бионикой.
Все рабочие органы существующих машин для обработки почвы создавались на основе теории сельскохозяйственных машин, закономерностей теоретической механики, а на современном этапе с использованием принципов и методов механики сплошной среды. В дальнейшем эти машины рекомендовались практически для всех агроклиматических зон России. Однако, для соответствия климатическим условиям Республики Крым необходимы дальнейшие разработки по усовершенствованию форм рабочих органов и принципов их воздействия на почву. Одним из основных примеров может служить опыт Казахстана, при освоении целинных земель, на основании которого были созданы принципиально новые противоэрозионные почвообрабатывающие комплексы машин, применительно к условиям Казахской агроклиматической зоны.
В Крыму внедрение системы земледелия малоразрушающего рыхления почвы сдерживается отсутствием адаптированных технических средств, способных выполнять комбинированные приёмы обработки почвы и, при этом, минимизировать в ней эрозионные процессы.
Таким образом, возникает противоречие между требованиями, предъявляемыми к традиционным почвозащитным способам с соответствующими техническими средствами и поверхностной противоэрозионной обработкой не обеспечивающими надёжную защиту почв от эрозии и комплексом технических средств, для поверхностной обработки почвы по системе земледелия малоразрушающего рыхления почвы в агроклиматической зоне Республики Крым.
В этом аспекте наиболее важным способом решения такого противоречия является биосистемный подход, базирующийся на основе принципов бионики. Существующие рабочие органы машин для поверхностной обработки почвы, в основном, используют только силовое воздействие, а обоснование основных параметров машин направленно только на снижение тягового сопротивления. При этом попадая в живую биологическую среду в виде системы «почва-растение-атмосфера» рабочие органы являются инородными элементами, снижающими уровень существования данной биологической системы. Оптимальным рабочим органом в почве, с точки зрения природного образования гумуса, является дождевой червь. За счёт особенностей технологического процесса перемещения в гумусообразующем слое почвы дождевой червь оптимизирует наличие в нём двух основных элементов – воздуха и влажности. В среднем, на 1 м2 площади обитает до 30 червей. За 6 месяцев такое количество червей пропускает сквозь свой кишечник около 1000 кг земли на 1 га. При этом число червей на 1 м2 площади может превышать при благоприятных условиях до 100 штук.
Анализ работы позывает, что дождевой червь является полностью вживляемой частью экосистемы гумусообразующего слоя почвы, при этом он также, как и существующие рабочие органы почвообрабатывающих машин, её рыхлит. Поэтому понятие «вживляемости» существующих почвообрабатывающих рабочих органов в биологическую систему почвы остаётся не решённым. Используемые теории расчёта параметров рабочих органов почвообрабатывающих машин с применением обратной связи в биологической системе гумусообразующего слоя почвы не дают возможности устойчивого взаимного функционирования. Данную научную проблему можно решить, используя повышение надёжности биологической системы почвы, путём адаптации рабочего органа, приведя его к подобию живого организма и придания ему определённых геометрических форм, динамики движения и свойств живого прототипа.
Поэтому, основная работа научной школы посвящена разработке теоретических основ и практического использования бионического моделирования почвообрабатывающих рабочих органов, направленных на повышение качества поверхностной противоэрозионной обработки почвы, по системе земледелия малоразрушающего рыхления почвы, и сохранение плодородия, нормализации влагонакопления и минимизации ветровой эрозии, что является актуальной и имеет важное хозяйственное и экологическое значение.
Изменение общей направленности подготовки специалистов в этой научной области важное, но далеко не единственное видоизменение. Не менее насущной является потребность видоизменения и самого содержания нового научного подхода.
Целью научной школы является развитие нового бионического направления в земледельческой механике, ознакомление обучающихся, будущих магистров, аспирантов и молодых учёных с новым научным направлением в земледельческой механике на основе системного подхода – современными приемами и методами бионики по разработке малоэнергоемких сельскохозяйственных машин и обоснованию оптимальных параметров их рабочих органов.
Для достижения поставленной цели на базе кафедры механизации и технического сервиса в АПК Академии биоресурсов и природопользования используется лаборатория научных исследований (3а/5г), которая имеет тензоизмерительную аппаратуру, различные типы датчиков. Исследовательский участок лаборатории включает почвенный канал с приводной станцией и мобильной тележкой на рельсах почвенного канала с возможностью установки на ней различных типов исследуемых рабочих органов и регулировки режимов работы. Измерительный комплекс позволяет фиксировать амплитудно-частотные характеристики и энергетические показатели почвообрабатывающих рабочих органов по бионическому подобию.
Руководитель научной школы
- Бабицкий Леонид Федорович, заведующий кафедрой механизации и технического сервиса в АПК Академии биоресурсов и природопользования ФГАОУ ВО «КФУ им. В.И. Вернадского»
Участники научной школы
Основными участниками и ведущими учеными научной школы в данной области являются
- Соболевский Иван Витальевич, кандидат технических наук, доцент, доцент кафедры механизации, и технического сервиса в АПК Академии биоресурсов и природопользования ФГАОУ ВО «КФУ им. В.И. Вернадского»
- Москалевич Вадим Юрьевич, кандидат технических наук, доцент, доцент кафедры механизации и технического сервиса в АПК Академии биоресурсов и природопользования ФГАОУ ВО «КФУ им. В.И. Вернадского»
- Куклин Владимир Алексеевич, кандидат технических наук, доцент кафедры механизации и технического сервиса в АПК Академии биоресурсов и природопользования ФГАОУ ВО «КФУ
им. В.И. Вернадского» - Мищук Сергей Анатольевич, кандидат технических наук, доцент, доцент кафедры механизации и технического сервиса в АПК, Академии биоресурсов и природопользования ФГАОУ ВО «КФУ им. В.И. Вернадского»
- Вербицкий Алексей Петрович, кандидат технических наук, доцент, заведующий кафедрой технологии и оборудования производства и переработки продукции животноводства Академии биоресурсов и природопользования ФГАОУ ВО «КФУ им. В.И. Вернадского»
- Кувшинов Андрей Алексеевич, кандидат технических наук, доцент, заведующий отделом механизации Национального научного центра «Институт виноградарства и виноделия им. В.Е. Таирова»
- Падалка Вячеслав Викторович, кандидат технических наук, доцент, доцент кафедры машиноиспользования и производственного обучения, Полтавской государственной аграрной академии
- Ляшенко Сергей Васильевич, кандидат технических наук, доцент, доцент кафедры машиноиспользования и производственного обучения, Полтавской государственной аграрной академии
- Белов Александр Викторович, ассистент кафедры механизации и технического сервиса в АПК, Академии биоресурсов и природопользования ФГАОУ ВО «КФУ им. В.И. Вернадского»
Основная информация о научных конференциях, организованных научной школой
Сводный список основных работ учёных научной школы
Основные результаты исследований научной школы
Научное и практическое сотрудничество научной школы в совместных проектах и технических разработках
Резюме руководителя